生物有机体能够改变自身形态以动态适应环境,而传统工程系统通常局限于固定的结构和功能。响应性材料系统的出现缩小了这一性能差距,这类材料可通过改变自身特性或施加机械力,对外界刺激做出形状变形反应。
目前,相关研究在响应材料、制造能力和仿真模型方面取得了一定进展,已开发出能对热、光、湿度等多种刺激做出反应的材料系统,并应用于微创手术、药物递送等多个领域。但现有研究多侧重于制造创新,缺乏有效的逆向设计方法,大多依赖人类经验或启发式方法设计,难以实现复杂的形状变形行为。同时,现有逆向设计方法多针对单一刺激(尤其是热刺激),且未充分考虑制造过程的优化,无法满足多刺激响应材料系统的设计需求。
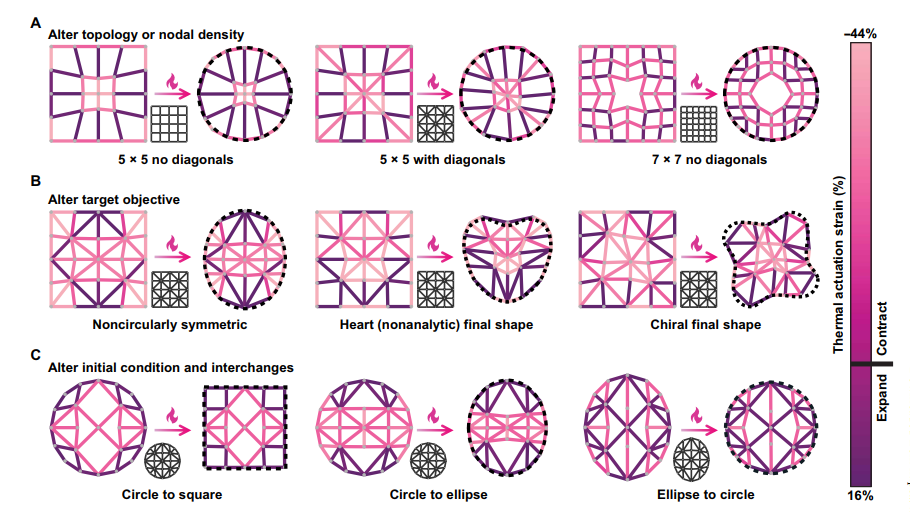
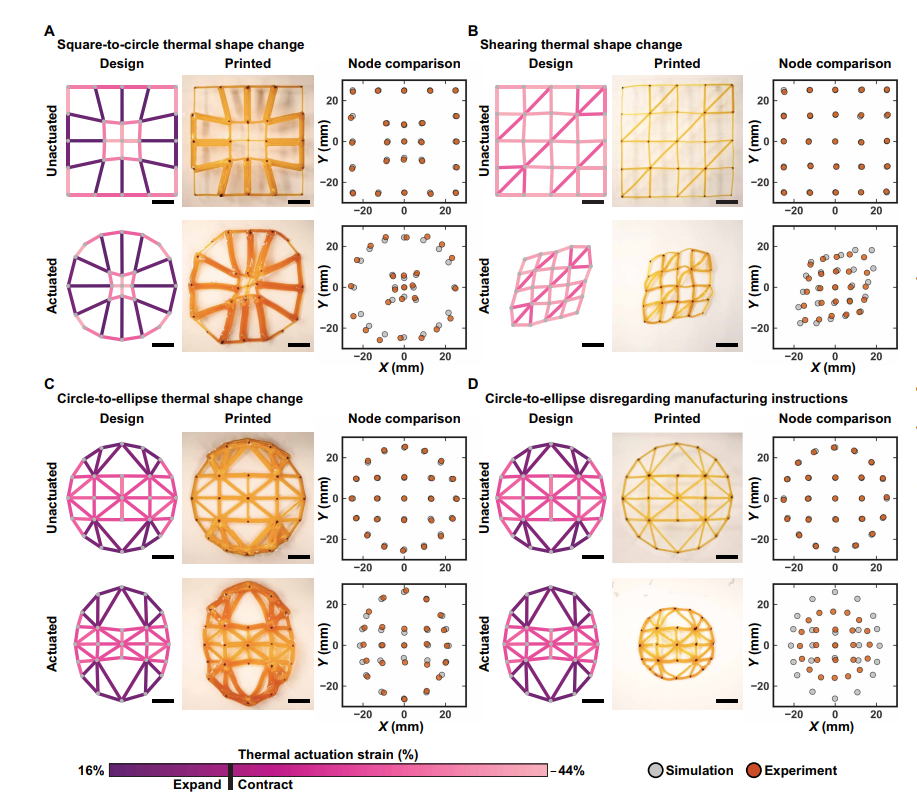
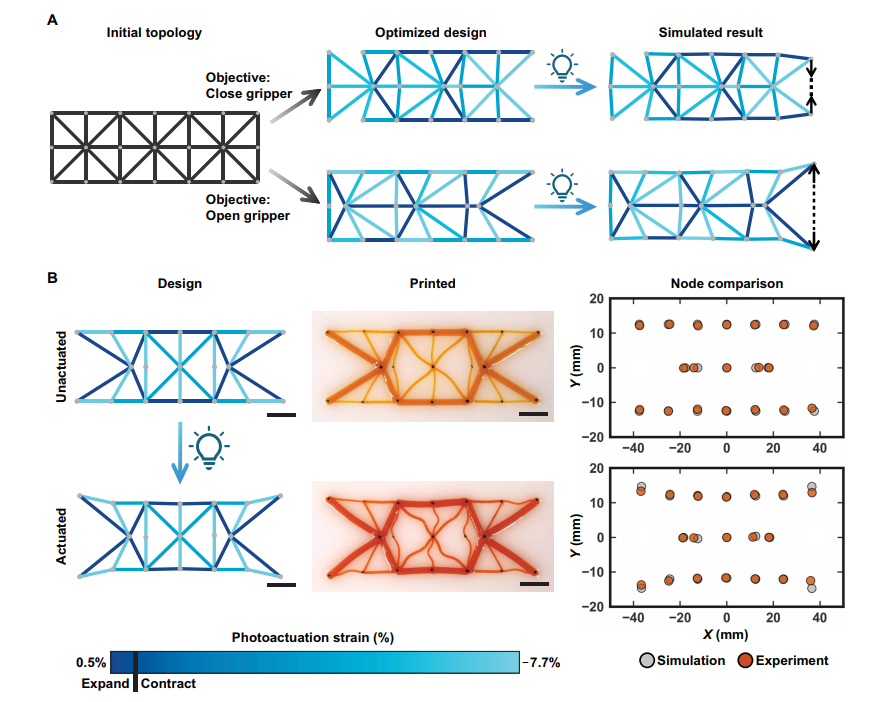
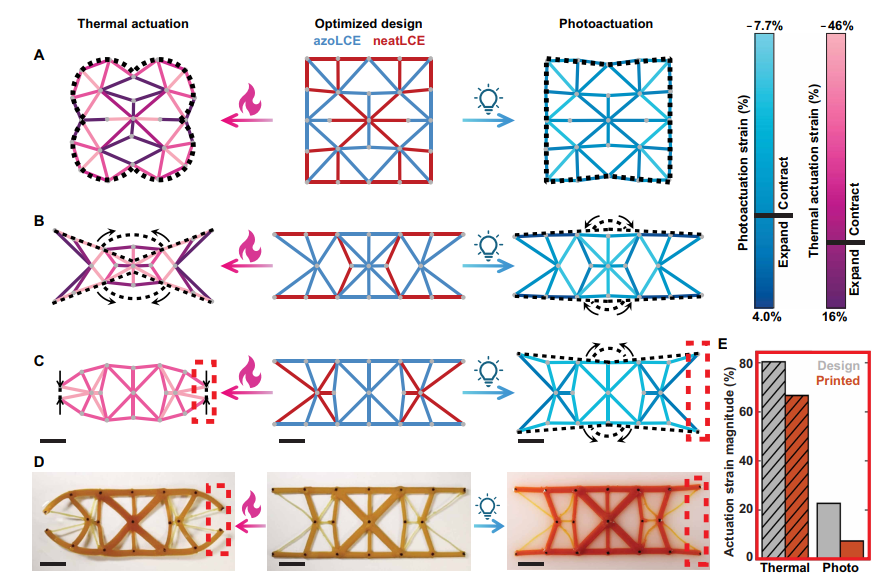
构建了一个统一的自主协同设计框架,可同时优化多刺激响应材料系统的结构、制造、材料和刺激因素,无需依赖人类经验即可实现目标形状变形。该框架整合了广义拓扑优化与混合数据-物理可微仿真,具体包含两部分核心内容:
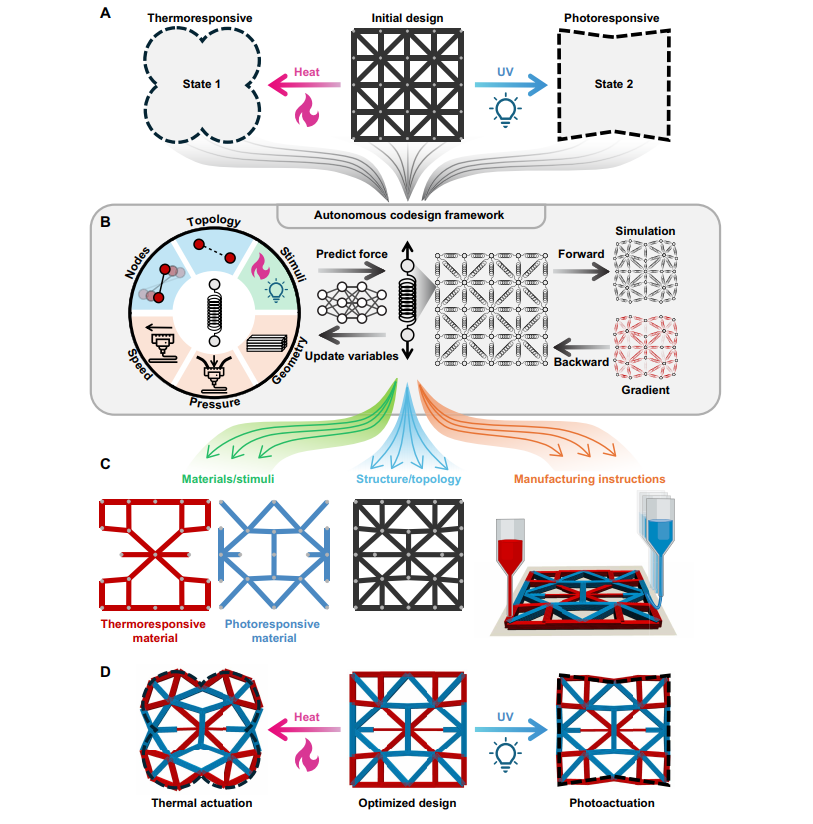
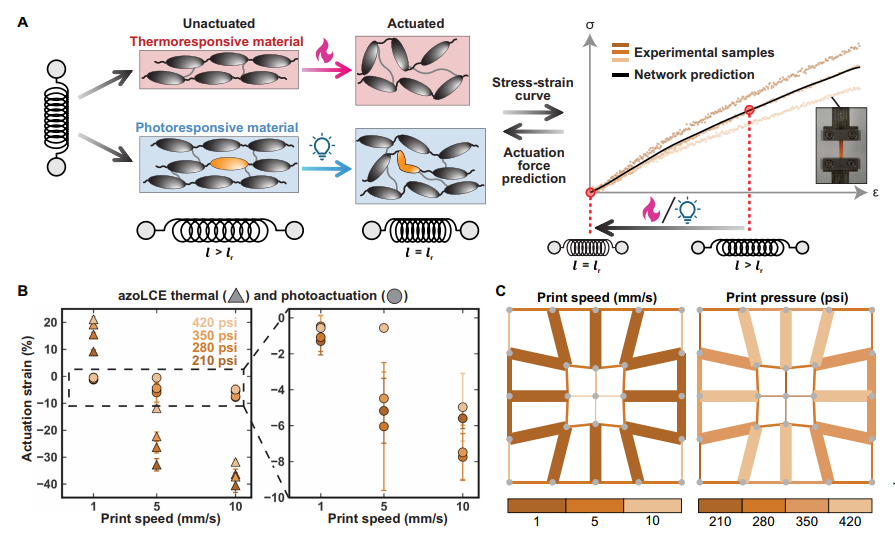
选择液晶弹性体(LCE)作为研究对象,开发了两种LCE配方:偶氮苯功能化LCE(azoLCE,响应热和紫外光)和纯LCE(neatLCE,仅响应热)。采用多材料高温直接墨水书写(HOT-DIW)3D打印技术,确定打印速度、压力和路径数为关键制造参数,通过实验表征这些参数对材料刚度和变形性能的影响,并将实验数据用于训练神经网络模型。
| 项目 | 内容 |
|---|---|
| 标题 | Autonomous codesign and fabrication of multistimuli-responsive material systems |
| 作者 | Liwei Wang, Alexander L. Evenchik, Jared M. Yang, Ryan L. Truby, Wei Chen |
| 发表期刊 | Science Advances |
| 发表时间 | 2025年9月12日 |
| DOI | 10.1126/sciadv.adx4409 |
|
|
|
|
|
|
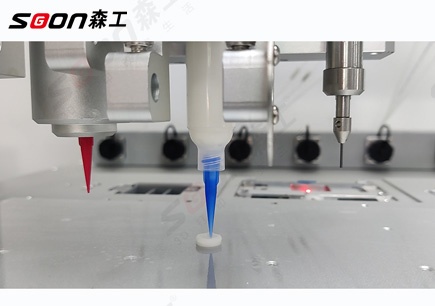
全面解析森工DIW墨水直写3D打印机在该类研究中功能匹配情况及需定制功能,帮助用户更好地选择合适的3D打印设备及功能模块。
①多喷头打印:配备精密的调压模块,调压精度±1KP,实现不同粘度材料的稳定打印;
②高温喷头:温度范围:室温~300℃,喷头料筒满载容量10cc,独立式控温,打印材料在料筒及针尖均可实现精确温控,满足不同材料打印温度需求;
③光固化模块:紫外固化模块:支持4波长紫外固化灯(365、385、395、405nm),实现距离、照射角度、光功率等多参数可调,以满足不同材料的固话模式;
①高温平台:恒温加热,保证材料在一定的温度范围内进行热固化;
②为了提高实验效率,可使用独立二级平台搭配显微镜,实时对每一层进行打印精度观察,包含了材料线宽的一致性以及基板表面平整度问题,及时修正实验数据。
①高温平台:模块化设计,区域尺寸:200*150*60mm;控温范围:室温-100℃。
③独立二级运动平台:
a. 独立的运动控制系统,支持独立运动,模块化快拆快装,拆卸后不影响原来行程;
b. XYZ轴定位精度≤0.01mm;
c. 二级平台尺寸:257x290x69.5mm;
d. 二级平台可打印范围:200x150x30mm;
e. 二级平台独立移动范围:X≥100mm;Y≥160mm;Z轴≥6.5mm;
便于打印过程中,通过显微镜实时查看每层的微观变化及中途干预。
由于小编学识所限,文中内容难免存在疏漏或不足之处。若您发现任何错误或值得商榷的观点,恳请不吝指正,
小编将第一时间修正完善。感谢您的包容与支持!
本文内容来源于网络公开素材,发布的目的在于学术交流、研讨分享,
如相关内容涉及侵权,请联系我们,将第一时间下架内容!

3D打印高性能Ag/BaTiO₃陶瓷-聚合物压电传感器,赋能生物医学应用
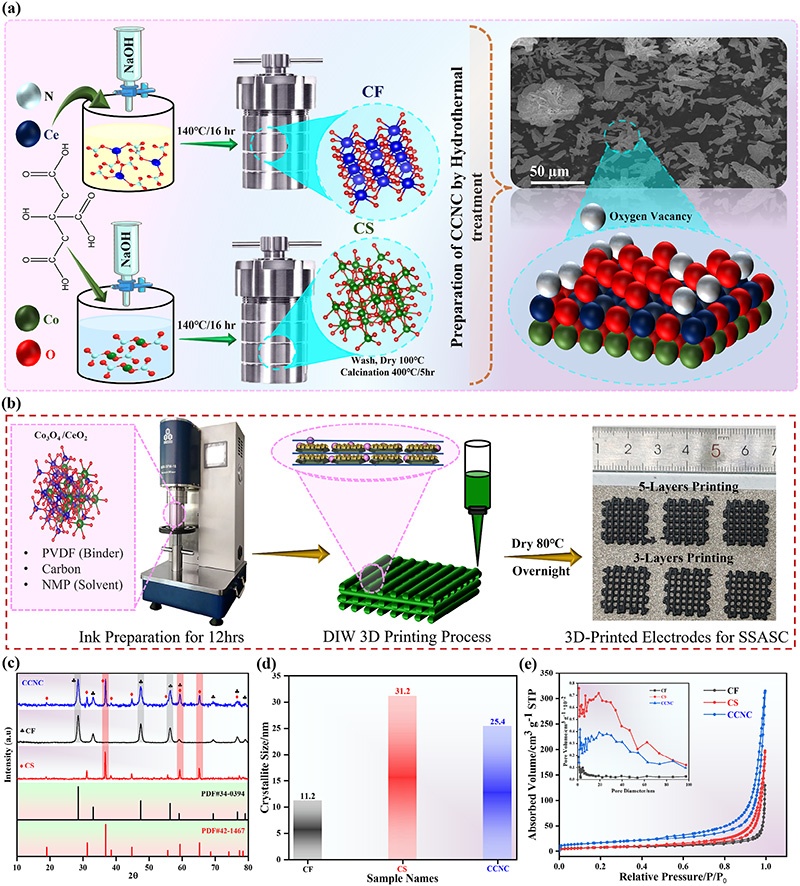
用于3D打印分层多孔电极的Co₃O₄/CeO₂高性能墨水,助力固态超级电容器能量密度跃升
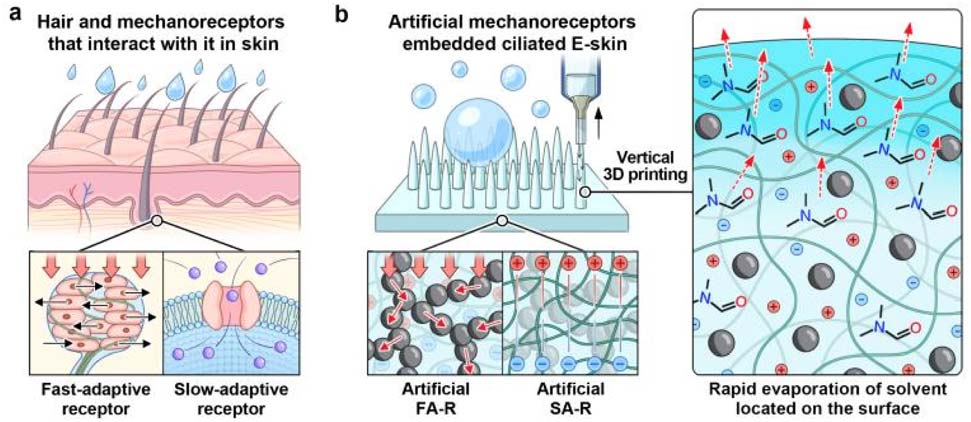
基于直写式垂直 3D 打印技术、嵌入多个人工机械感受器的防水纤毛电子皮肤及其在船员健康管理中的应用

再传喜报,森工AutoBio1000直写3D打印设备助力华师大&韩国KAIST科研团队在材料科学顶刊发表高水平论文
关于不法分子冒用“森工科技”实施APP诈骗的严正声明
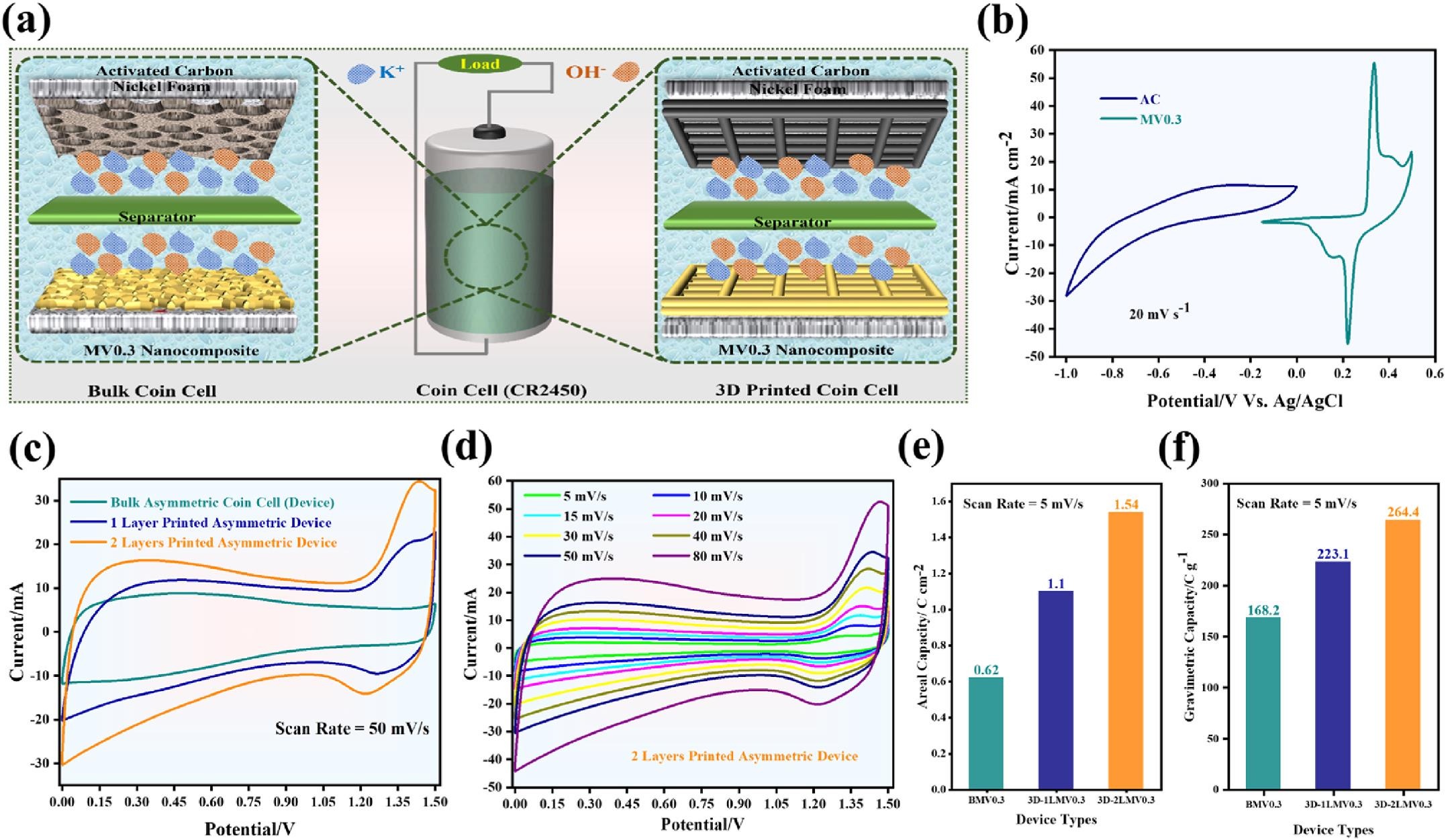
Structural-engineered V₂O₅/MoO₃ nanocomposite scaffolds via direct ink writing 3D printing for asymm