在先进制造、医疗机器人和具身智能领域,开发具备集成传感能力的智能机器人至关重要。现有的机器人传感技术局限于记录加速度、驱动扭矩、压力反馈等数据,而扩展并集成多模态传感器以模拟甚至超越人类感知的技术尚不完善。
柔性电子在柔性人机界面应用中日益普及,这类界面是人类与外界(尤其是计算机、机器人和假肢)交互通信的载体,注重可用性、可访问性和可学习性。近年来,柔性电子的发展使人体能配备柔性电子皮肤(e-skin),可识别生命体征、身体动作及脑电(EEG)、肌电(EMG)等生理信号以解码意图;同时,人机界面已从单向操控发展为双向通信,新增机器人触觉传感、材料识别等多模态感知功能。
尽管前景广阔,仍存在关键挑战:
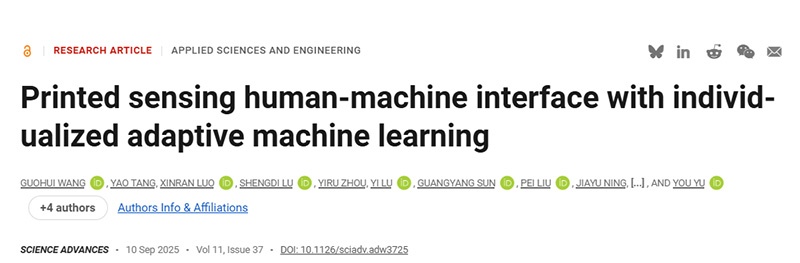
研究提出的3D打印人机界面核心架构包含三部分:用于表面肌电(sEMG)采集和刺激反馈的电子皮肤、多模态触觉感知传感软体机器人、手势分类与材料识别的机器学习算法(图1A)。
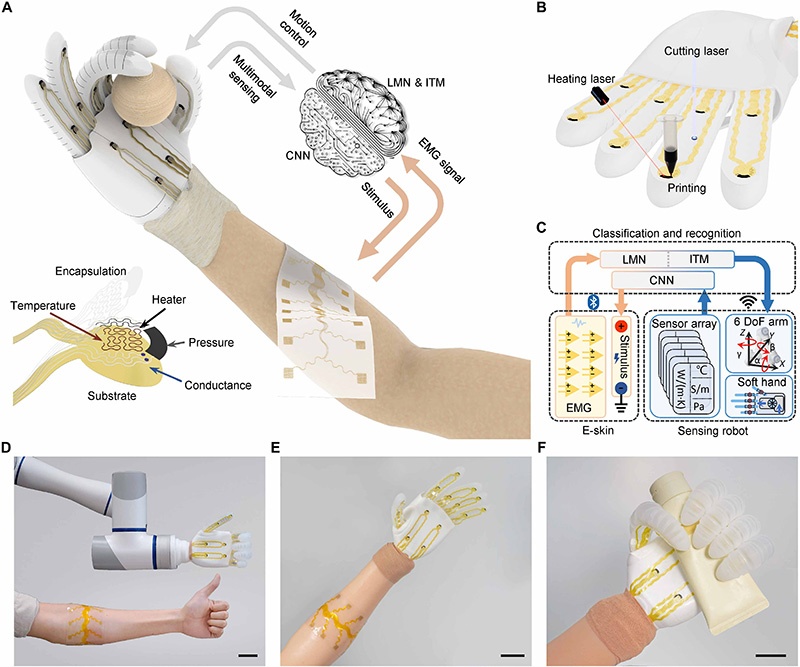
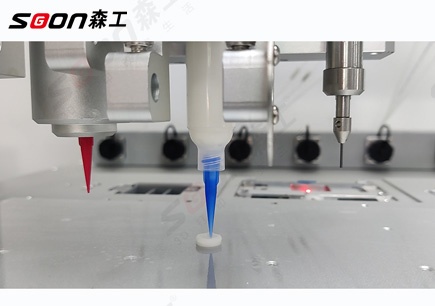
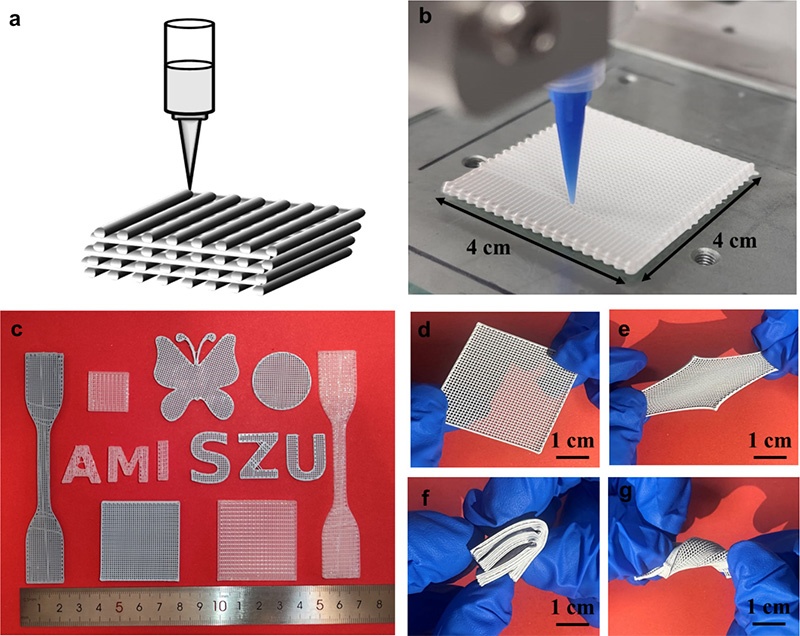
1. 核心制造技术:采用“DIW墨水直写3D打印+红外激光+切割激光”的大规模集成3D打印技术,制造多材料、高密度传感器阵列的柔性生物电子器件(图1B)。关键工艺包括:
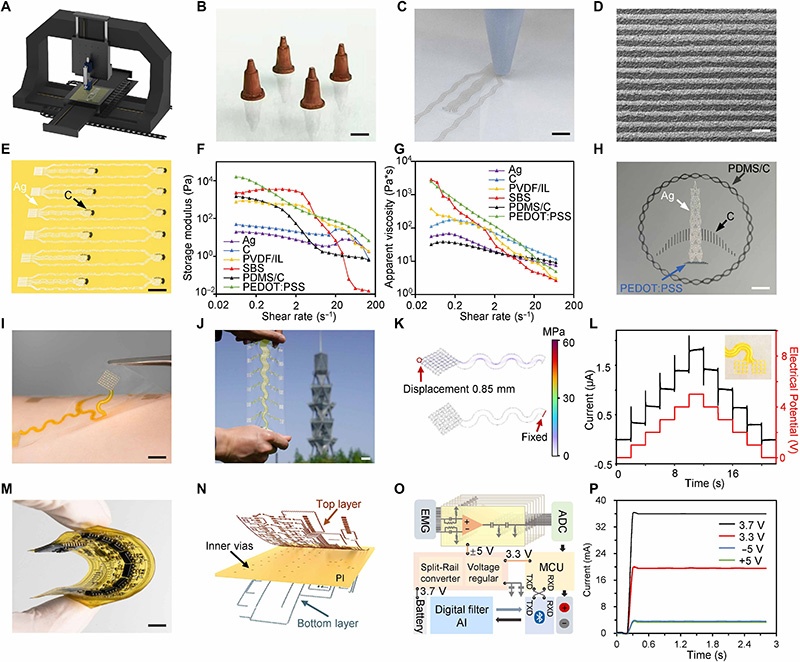
针对sEMG信号的个体差异与放置偏差,设计“线性映射网络(LMN)+inception时间模型(ITM)”的自适应学习框架(图3)。
多模态传感器阵列(温度、压力、导电、加热器)通过串行印刷集成,附着于软体机器人实现物体感知(图4)。
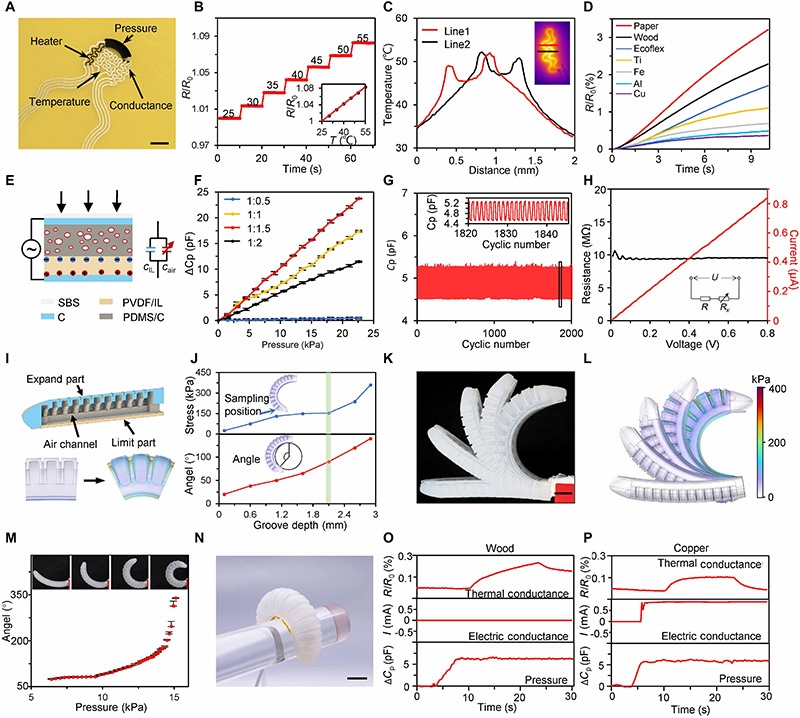
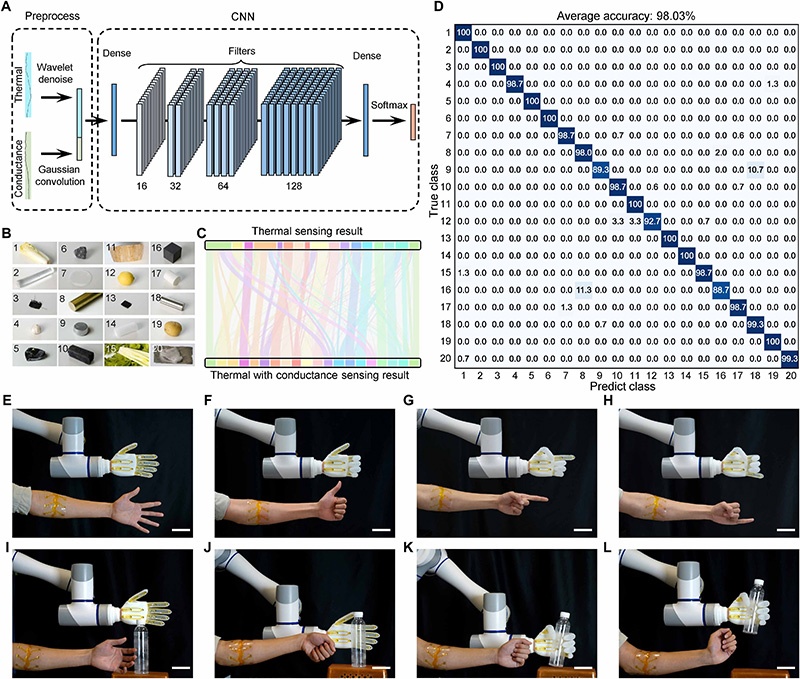
结合热导率与电导率传感,设计紧凑CNN网络实现物体识别(图5)。
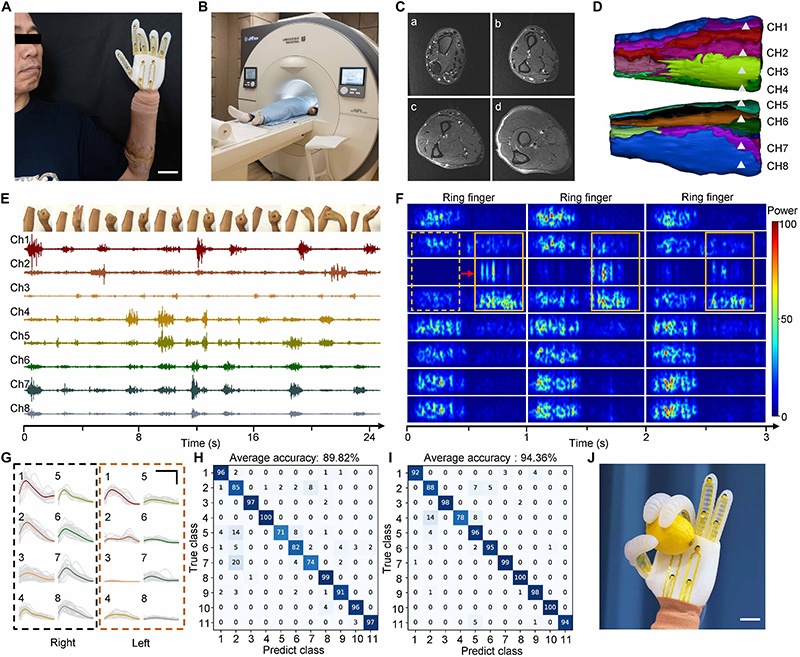
将系统作为假肢应用于左臂截肢受试者,验证医疗实用性(图6)。
| 信息类别 | 详细内容 |
|---|---|
| 论文标题 | Printed sensing human-machine interface with individualized adaptive machine learning |
| 引用文件 | sciadv.adw3725.pdf |
| 发表期刊 | Science Advances |
| 发表时间 | 2025年9月10日 |
| DOI | 10.1126/sciadv.adw3725 |
|
|
|
全面解析森工DIW墨水直写3D打印机在该类研究中功能匹配情况及需定制功能,帮助用户更好地选择合适的3D打印设备及功能模块。
由于小编学识所限,文中内容难免存在疏漏或不足之处。若您发现任何错误或值得商榷的观点,恳请不吝指正,
小编将第一时间修正完善。感谢您的包容与支持!
本文内容来源于网络公开素材,发布的目的在于学术交流、研讨分享,
如相关内容涉及侵权,请联系我们,将第一时间下架内容!

3D打印高性能Ag/BaTiO₃陶瓷-聚合物压电传感器,赋能生物医学应用
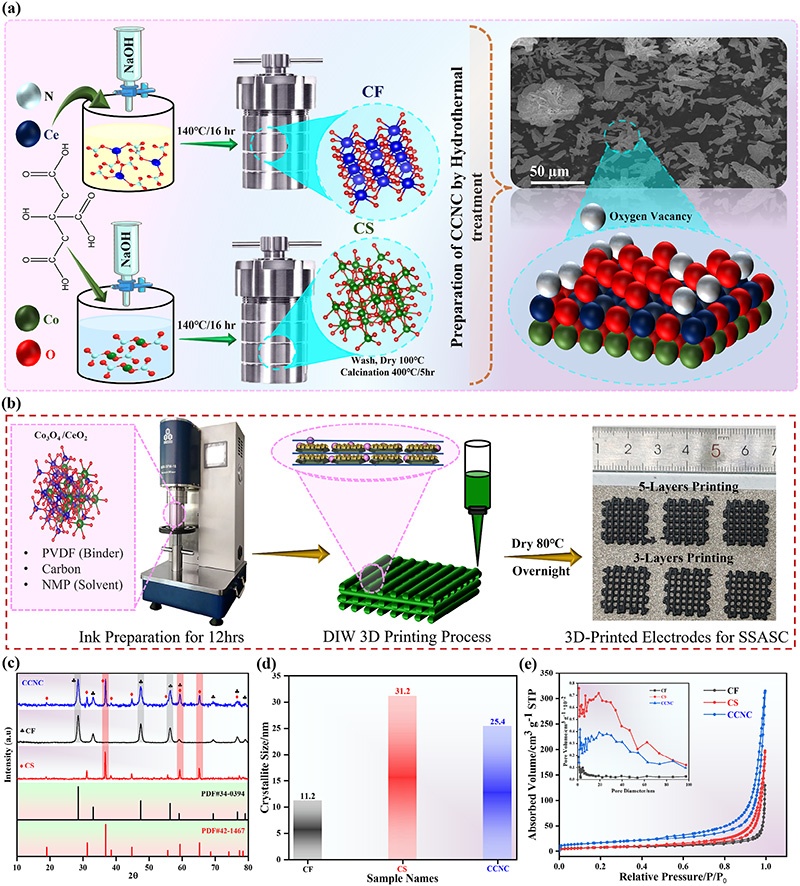
用于3D打印分层多孔电极的Co₃O₄/CeO₂高性能墨水,助力固态超级电容器能量密度跃升
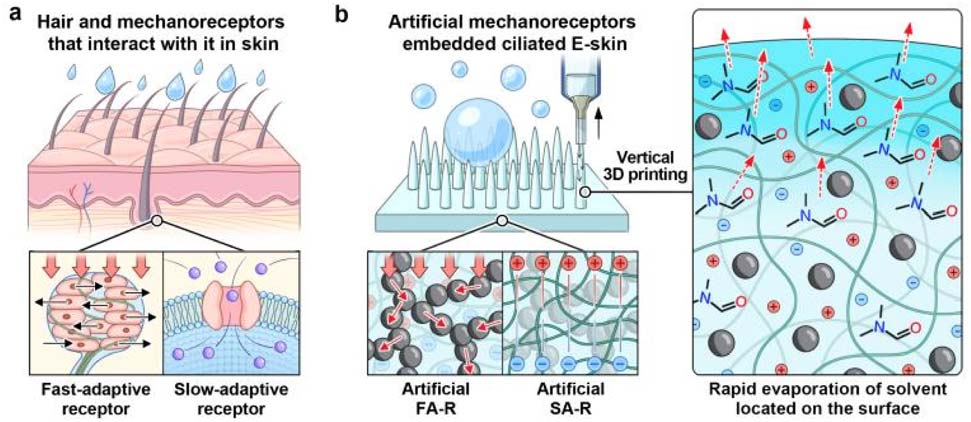
基于直写式垂直 3D 打印技术、嵌入多个人工机械感受器的防水纤毛电子皮肤及其在船员健康管理中的应用

再传喜报,森工AutoBio1000直写3D打印设备助力华师大&韩国KAIST科研团队在材料科学顶刊发表高水平论文
关于不法分子冒用“森工科技”实施APP诈骗的严正声明
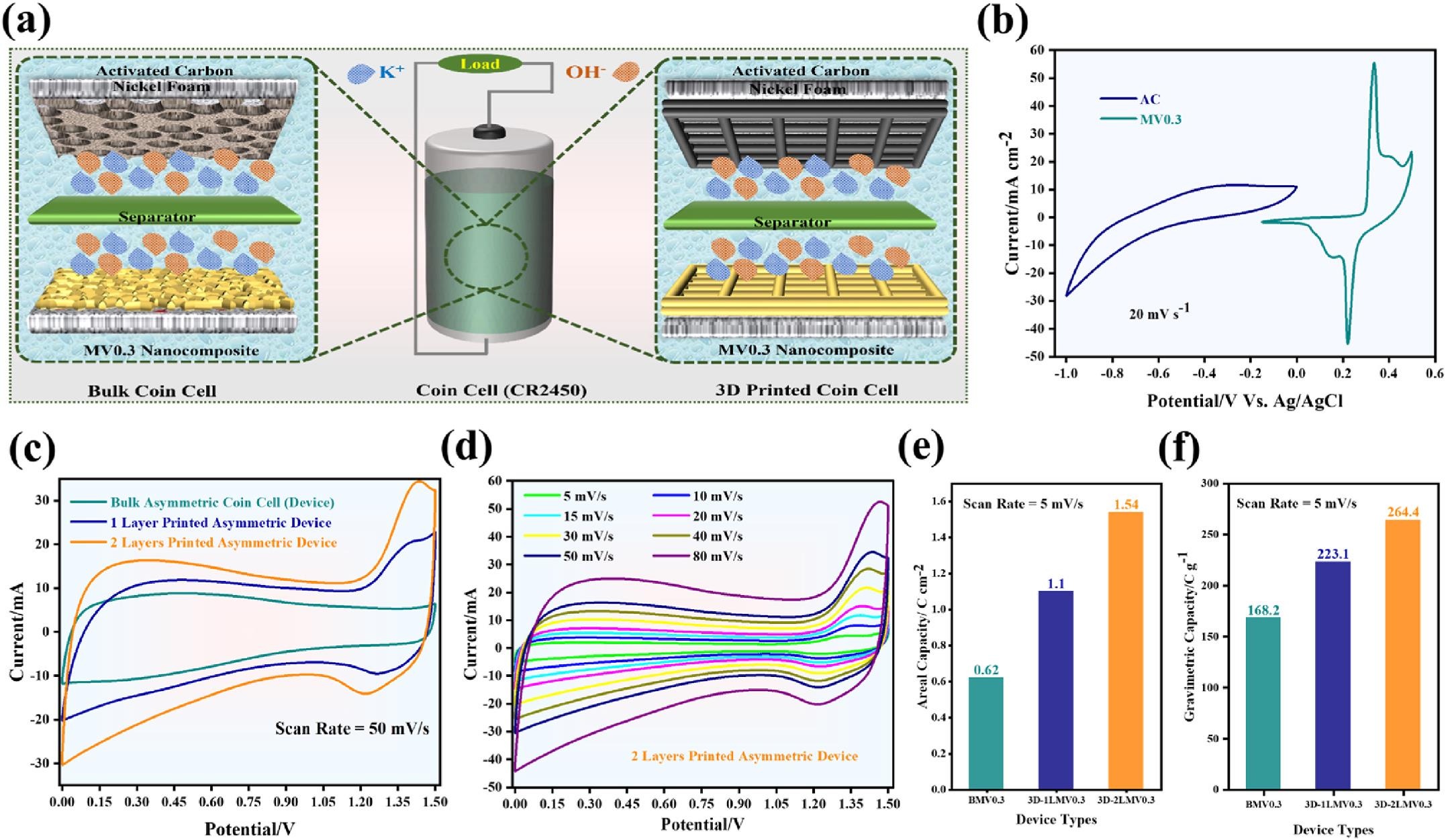
Structural-engineered V₂O₅/MoO₃ nanocomposite scaffolds via direct ink writing 3D printing for asymm