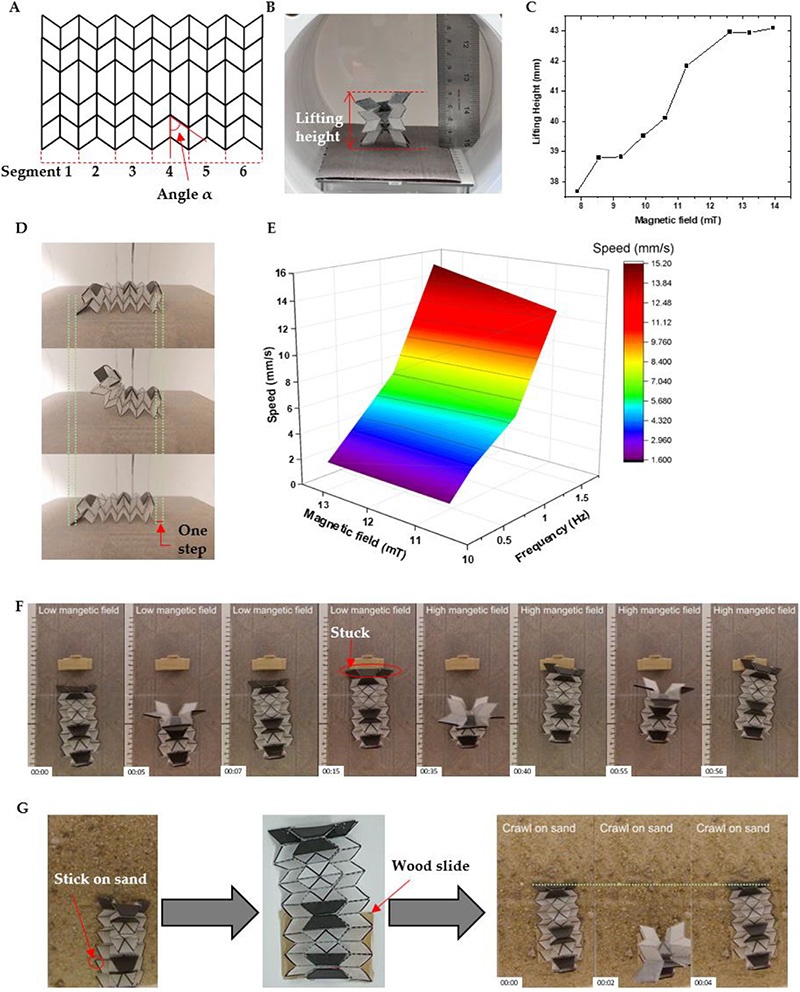
传统刚性磁驱动器因刚度失配易脱落,而现有软磁复合材料3D打印受限于低颗粒含量(<50 wt%)导致磁响应弱、结构单薄。折纸结构可将简单直线运动转化为复杂变形,但如何兼顾高颗粒含量、快速成型、结构复杂度与生物兼容性仍是空白。
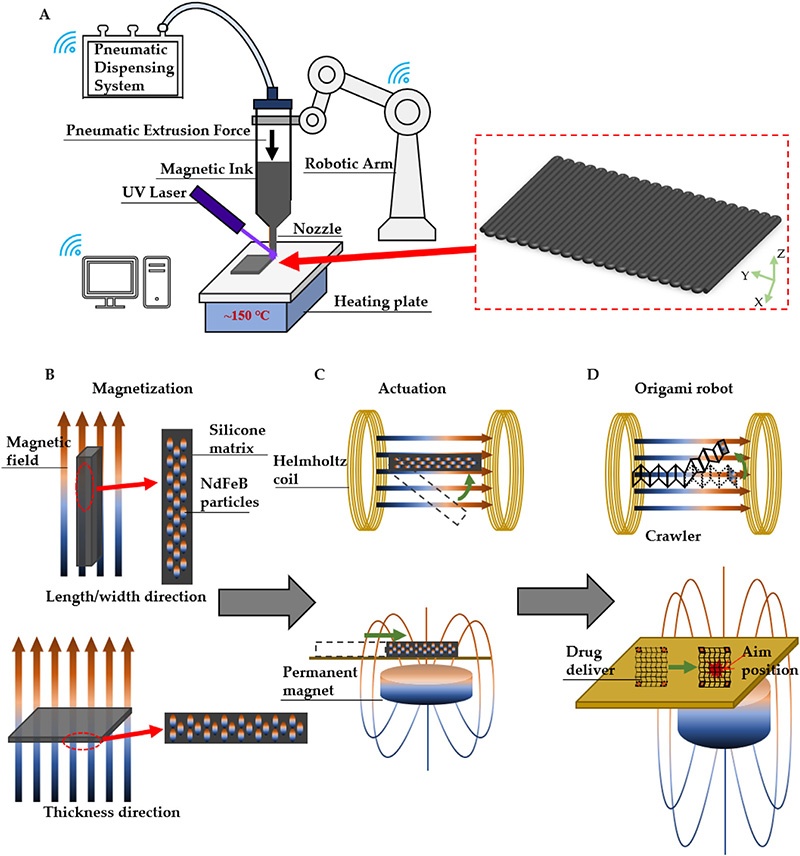
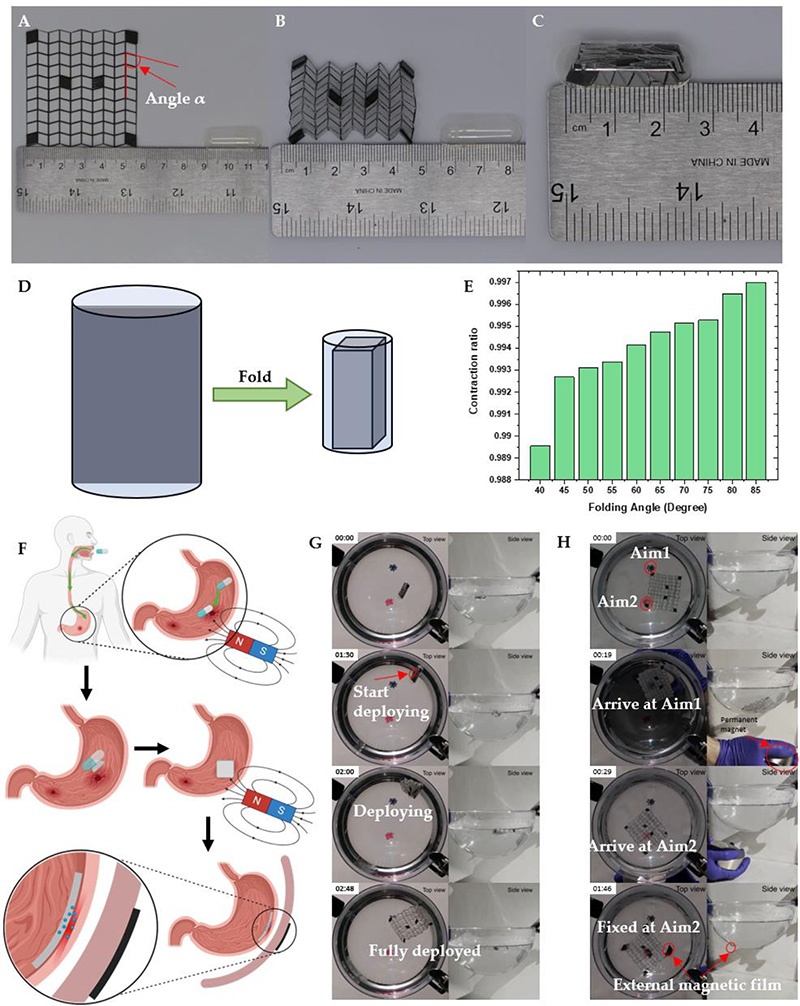
题目:3D-Printed Soft Magnetoactive Origami Actuators
期刊:Advanced Functional Materials, 2025, 35, e16404
作者:Sen Zhang, Yuan Li 等
通讯:Xiaomeng Fang (xfang3@ncsu.edu)
DOI:10.1002/adfm.202416404
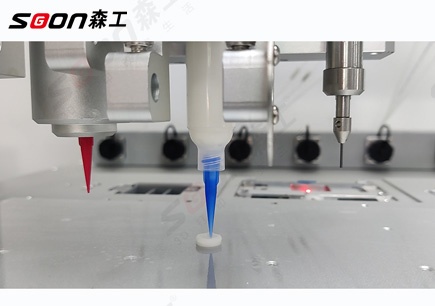
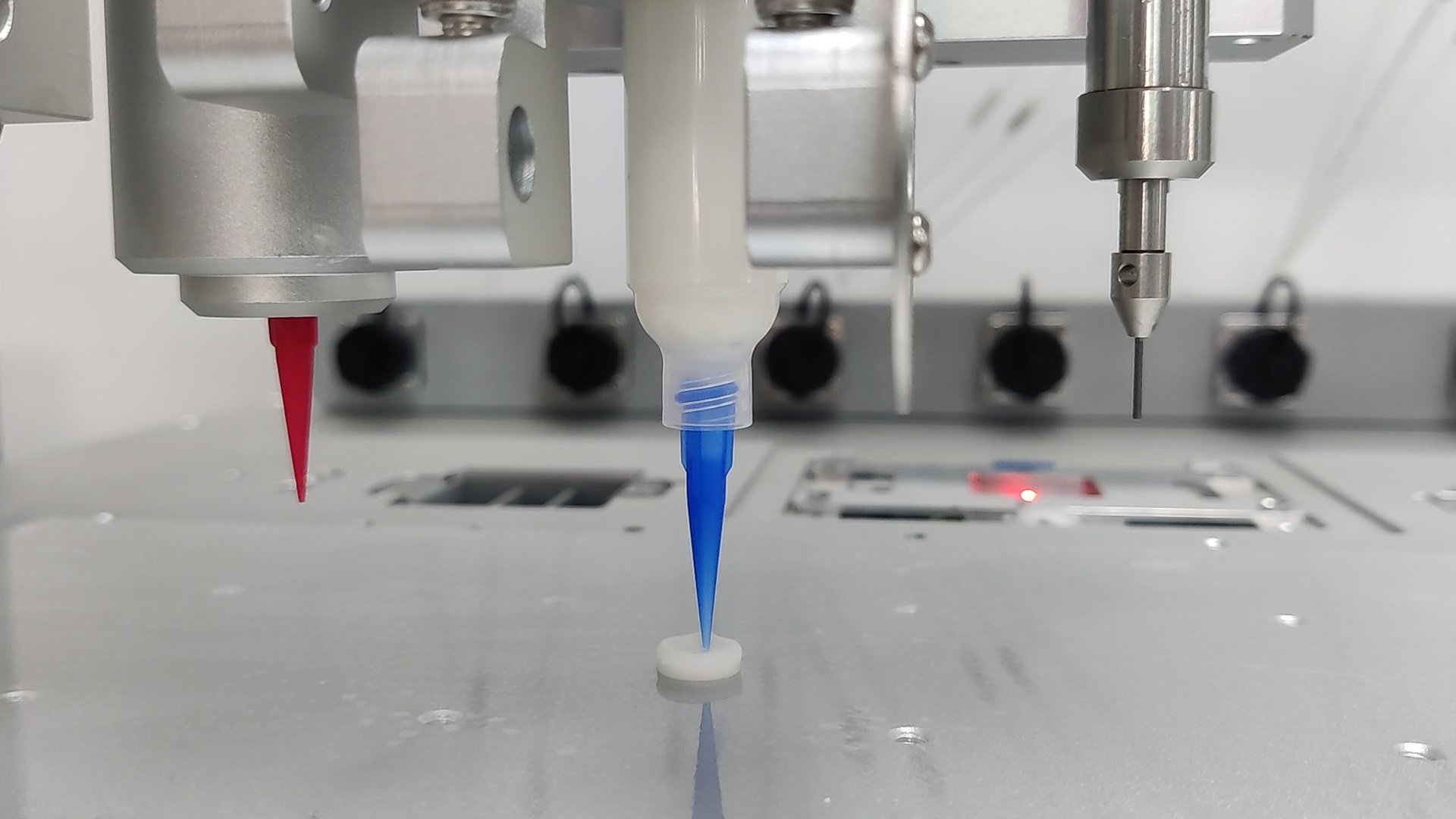
全面解析森工DIW墨水直写3D打印机在该类研究中功能匹配情况及需定制功能,帮助用户更好地选择合适的3D打印设备及功能模块。
由于小编学识所限,文中内容难免存在疏漏或不足之处。若您发现任何错误或值得商榷的观点,恳请不吝指正,
小编将第一时间修正完善。感谢您的包容与支持!
本文内容来源于网络公开素材,发布的目的在于学术交流、研讨分享,
如相关内容涉及侵权,请联系我们,将第一时间下架内容!

森工科技AutoBio系列生物3D打印机专业版和旗舰版应用于科研场景该怎么选择?
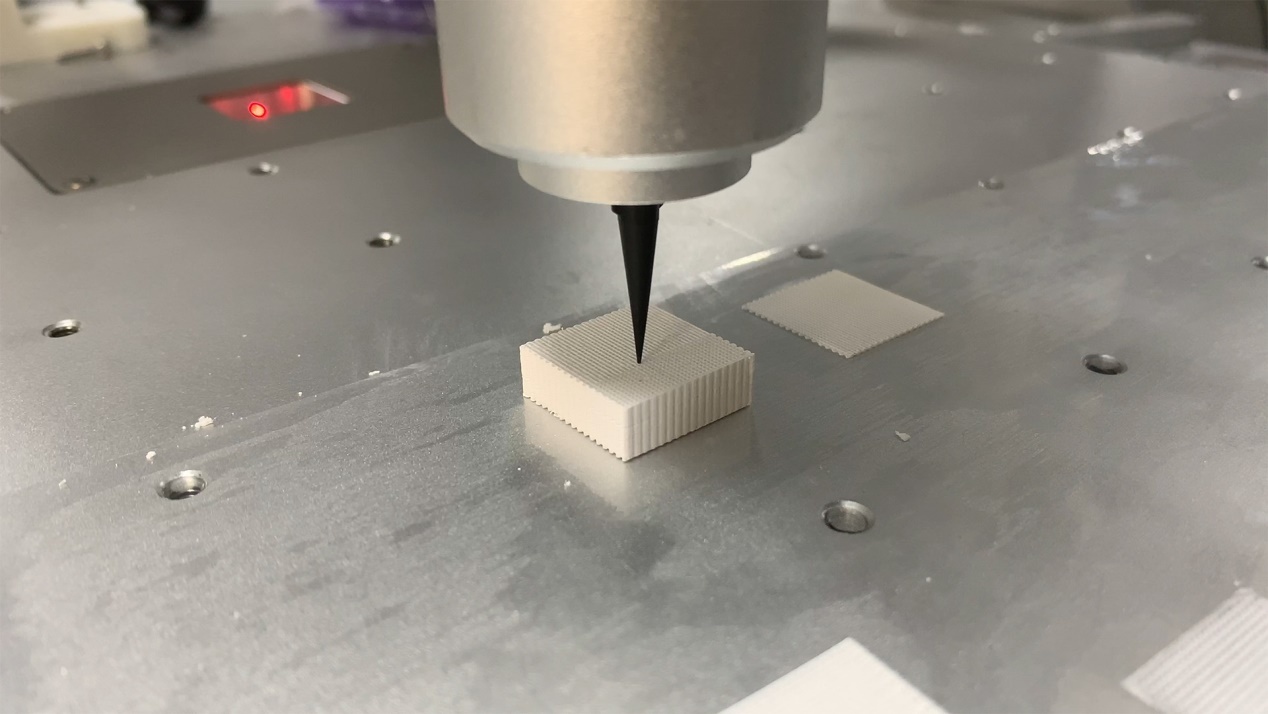
直写式(DIW)陶瓷 3D 打印机:科研领域的材料创新利器
论文分分享 I Structure design of an innovative 3-dimensional-printed emulsion carrier for stabilizing pol

森工科技亮相第四届陶瓷增材制造前沿科学家论坛 罗建旭发表“高性能非金属材料挤出直写与粘接剂喷射工艺解决方案”主题报告

森工科技 AutoBio2000多通道食品3D打印机助力深圳大学化学与环境工程学院食品科学与工程系范方辉团队登顶食品工程 TOP 期刊
DIW直写3D打印机在陶瓷材料科研领域的应用及优势